- Record: found
- Abstract: found
- Article: found
A Tightly-Coupled GPS/INS/UWB Cooperative Positioning Sensors System Supported by V2I Communication
Read this article at
Abstract
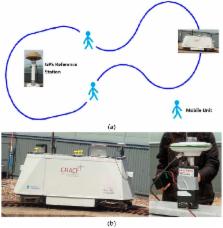
This paper investigates a tightly-coupled Global Position System (GPS)/Ultra-Wideband (UWB)/Inertial Navigation System (INS) cooperative positioning scheme using a Robust Kalman Filter (RKF) supported by V2I communication. The scheme proposes a method that uses range measurements of UWB units transmitted among the terminals as augmentation inputs of the observations. The UWB range inputs are used to reform the GPS observation equations that consist of pseudo-range and Doppler measurements and the updated observation equation is processed in a tightly-coupled GPS/UWB/INS integrated positioning equation using an adaptive Robust Kalman Filter. The result of the trial conducted on the roof of the Nottingham Geospatial Institute (NGI) at the University of Nottingham shows that the integrated solution provides better accuracy and improves the availability of the system in GPS denied environments. RKF can eliminate the effects of gross errors. Additionally, the internal and external reliabilities of the system are enhanced when the UWB observables received from the moving terminals are involved in the positioning algorithm.
Related collections
Most cited references22
- Record: found
- Abstract: not found
- Article: not found
Vehicular Networking: A Survey and Tutorial on Requirements, Architectures, Challenges, Standards and Solutions
- Record: found
- Abstract: not found
- Article: not found
A DSRC Doppler-Based Cooperative Positioning Enhancement for Vehicular Networks With GPS Availability
- Record: found
- Abstract: not found
- Article: not found