- Record: found
- Abstract: found
- Article: found
3D printing for soft robotics – a review

Read this article at
Abstract
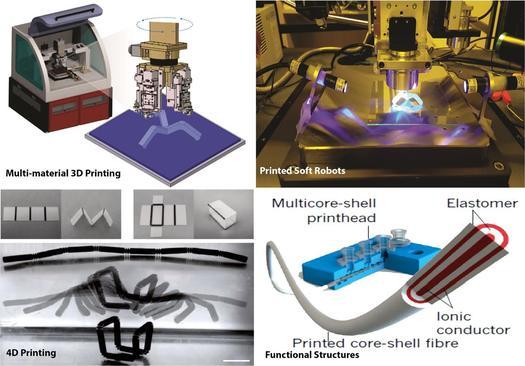
Soft robots have received an increasing attention due to their advantages of high flexibility and safety for human operators but the fabrication is a challenge. Recently, 3D printing has been used as a key technology to fabricate soft robots because of high quality and printing multiple materials at the same time. Functional soft materials are particularly well suited for soft robotics due to a wide range of stimulants and sensitive demonstration of large deformations, high motion complexities and varied multi-functionalities. This review comprises a detailed survey of 3D printing in soft robotics. The development of key 3D printing technologies and new materials along with composites for soft robotic applications is investigated. A brief summary of 3D-printed soft devices suitable for medical to industrial applications is also included. The growing research on both 3D printing and soft robotics needs a summary of the major reported studies and the authors believe that this review article serves the purpose.
Abstract
Related collections
Most cited references98
- Record: found
- Abstract: found
- Article: not found
Design, fabrication and control of soft robots.
- Record: found
- Abstract: found
- Article: not found