- Record: found
- Abstract: found
- Article: found
The Positioning Accuracy of BAUV Using Fusion of Data from USBL System and Movement Parameters Measurements
Read this article at
Abstract
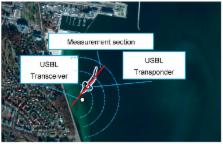
The article presents a study of the accuracy of estimating the position coordinates of BAUV (Biomimetic Autonomous Underwater Vehicle) by the extended Kalman filter (EKF) method. The fusion of movement parameters measurements and position coordinates fixes was applied. The movement parameters measurements are carried out by on-board navigation devices, while the position coordinates fixes are done by the USBL (Ultra Short Base Line) system. The problem of underwater positioning and the conceptual design of the BAUV navigation system constructed at the Naval Academy (Polish Naval Academy—PNA) are presented in the first part of the paper. The second part consists of description of the evaluation results of positioning accuracy, the genesis of the problem of selecting method for underwater positioning, and the mathematical description of the method of estimating the position coordinates using the EKF method by the fusion of measurements with on-board navigation and measurements obtained with the USBL system. The main part contains a description of experimental research. It consists of a simulation program of navigational parameter measurements carried out during the BAUV passage along the test section. Next, the article covers the determination of position coordinates on the basis of simulated parameters, using EKF and DR methods and the USBL system, which are then subjected to a comparative analysis of accuracy. The final part contains systemic conclusions justifying the desirability of applying the proposed fusion method of navigation parameters for the BAUV positioning.
Related collections
Most cited references31

- Record: found
- Abstract: found
- Article: found
A Kalman Filter Implementation for Precision Improvement in Low-Cost GPS Positioning of Tractors
- Record: found
- Abstract: not found
- Article: not found
Autonomous underwater vehicles for scientific and naval operations
- Record: found
- Abstract: not found
- Article: not found